

RINGSPANN 과 메인&붐 호이스트 및 트롤리
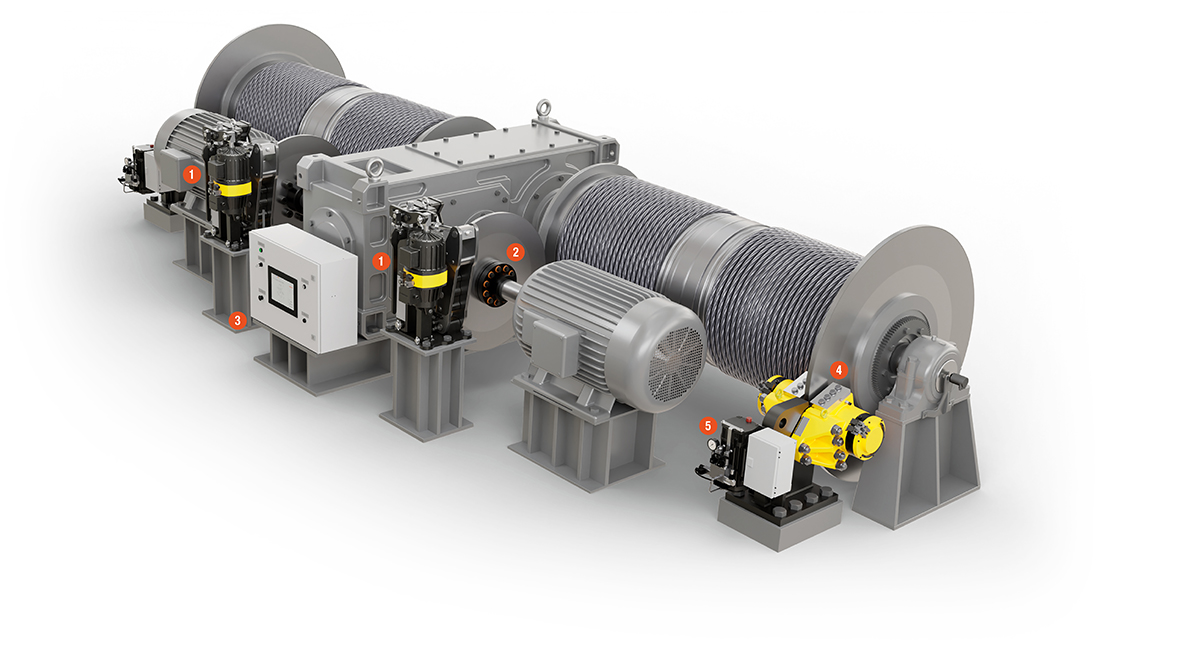


호이스트용 전기 유압 식 트러스터 브레이크 및 카플링

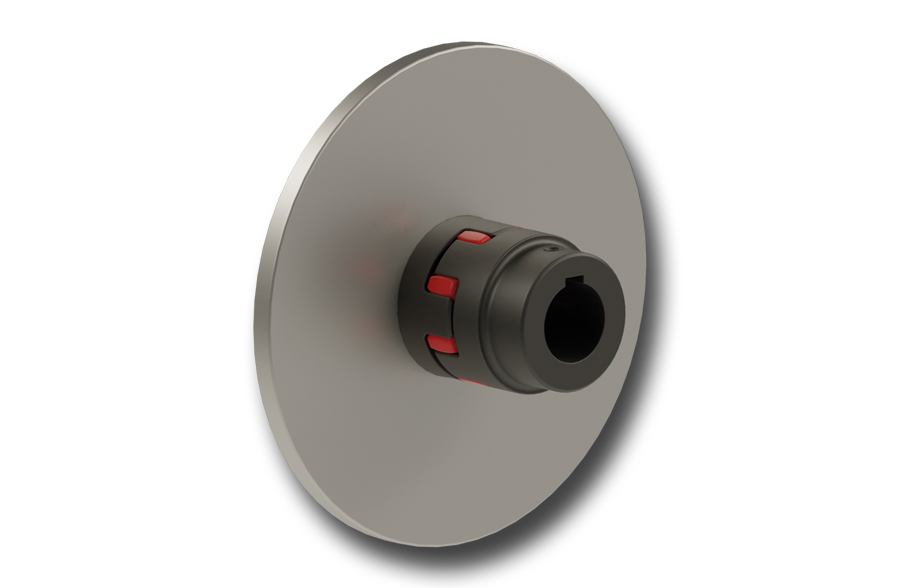
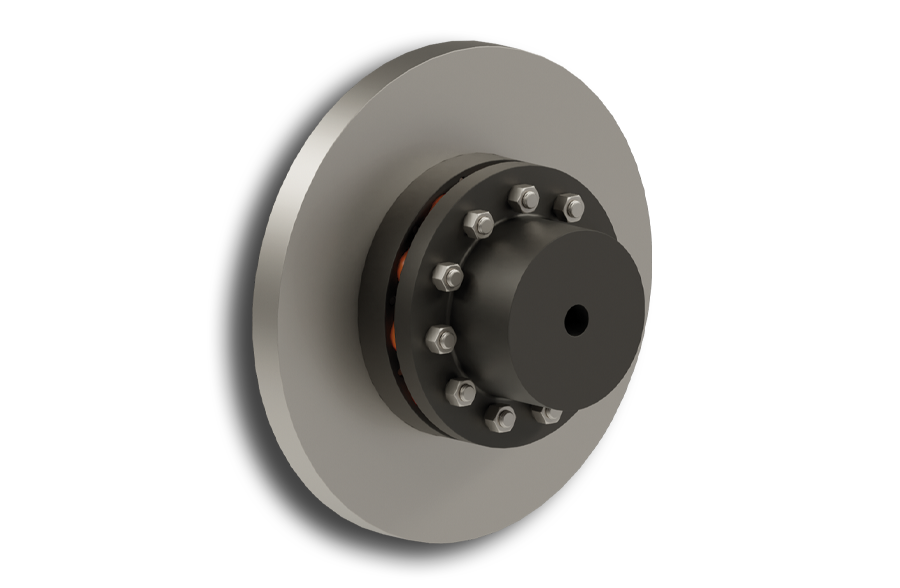
브레이크 디스크 장착된 핀 & 부시 및 죠카플링
- 브레이크 디스크 직경 최고 1000 mm 까지
- 최대 전달가능 토르크 337 kNm 까지
- 안전한 토르크 전달
- 축방향, 반지름 방향 및 앵귤라 오정렬 보정
- 낮은 유지보수
- ATEX 2014/34/EU 적합

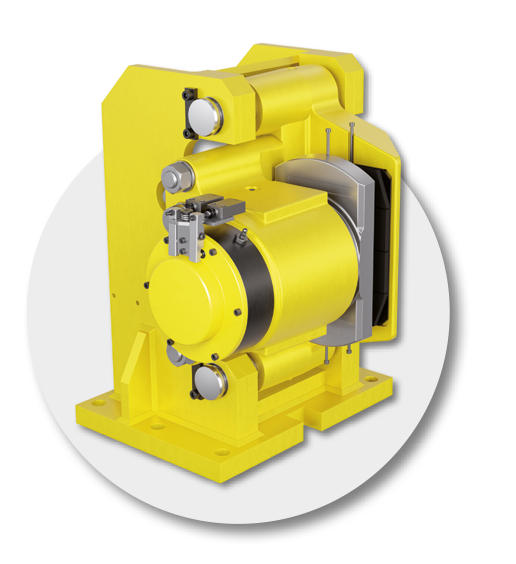
전기 유압식 트러스터 브레이크
- 견고한 자동 센터링 유닛, 조정하기 용이함
- 차폐된 자동 마모 보정장치
- 브레이크 해제시 패드 에어갭을 평행으로 유지함
- 경량 설계이면서 매우 높은 제동력
- 브레이크 센터 높이가 시장 표준에 따름: 160 mm, 230 mm, 280 mm 및 370 mm
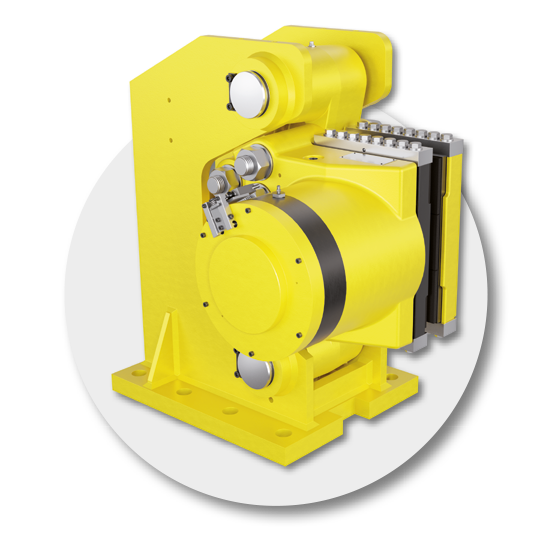
호이트용 전기유압식 트러스터

기어펌프로 작동되는 전기유압식 트러 스터
- 메인 호이스트와 트롤리와 같은 중요한 적용에 적합
- 기어펌프로 압력 형성
- 권상력 최대 8 kN 까지
- 초고속 세팅 타임 (< 80 ms)
- 100% 아날로그 설계– 기판이 전혀 필요없음
- 검증된 3 상 연결
- 브레이크 개방시 무부하로 회전하기 때문에 매우 낮은 전력소모
- 용이한 유지보수 - 솔레노이드 밸브와 같은 소모품을 트러스터를 브레이크로부터 탈거하지 않은 상태에서 교체함

임펠러 펌프식 전기 유압 트러스터
- 임펠러 펌프로 압력을 생성하는 보증된 디자인
- 단순하고 견고함 -유지보수가 용이한 설계
- 압상력 최고 4,5 kN 까지

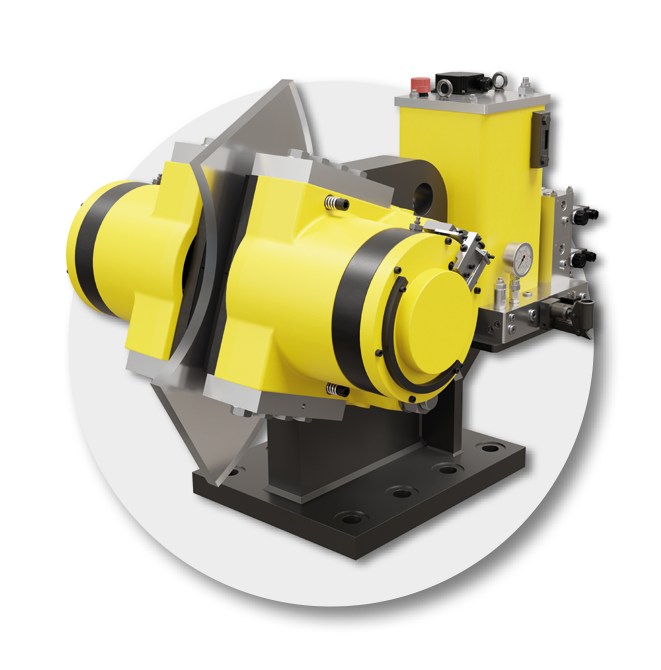
호이스트를 위한 비상 브레이크 캘리퍼 및 HPU


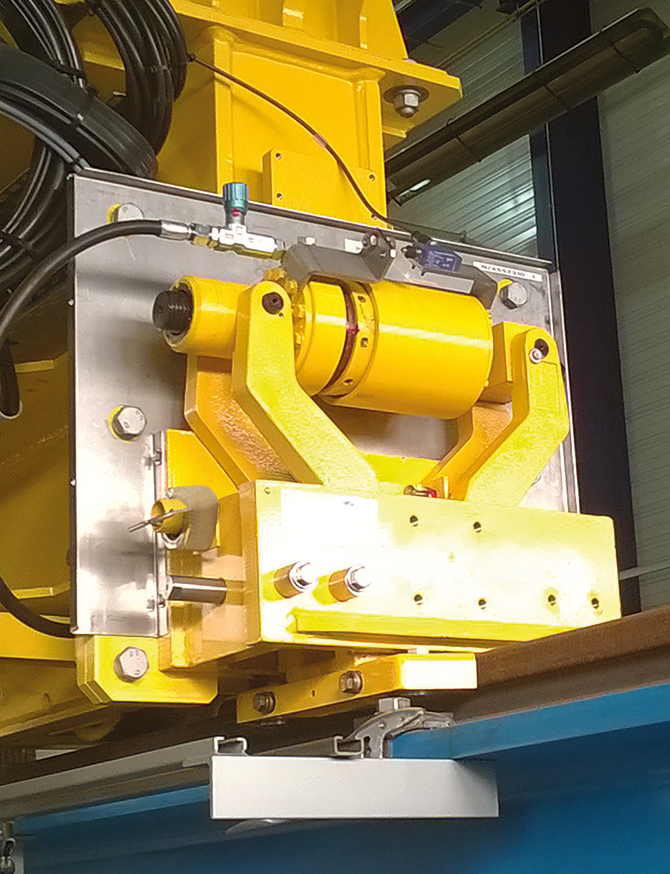
유압식 비상 브레이크 캘리퍼
- 고정된 캘리퍼 버젼 및 무게와 공간을 줄일 수 있는 플로팅 캘리퍼 버젼 제공
- 유압 챔버가 스프링 유닛 상부에 있어 씰 교체를 쉽고 안전하게 함
- 옵션으로, 브레이크 1-2 대가 콘솔에 이미 설치된 상태로 제공되며 HPU, 터미날 박스 및 유압 호스 또는 파이핑도 포함됨
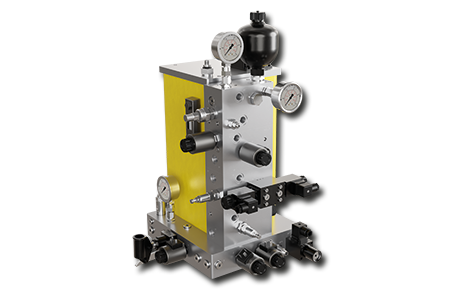
HPU
- 모듈식 셑업으로 단일 장치에 광범위한 기능 탑재 가능
- 제어되는 제동, 브레이크 힘 적응 또는 플랭크 변동 방지와 같은 광범위한 옵션 가능
- 수동 펌프 통합됨
- 옵션으로 저장탱크를 사용하여 브레이크 개방시간을 단축하거나 수동 해제를 용이하게 함

갠트리 구동용 스톰 브레이크
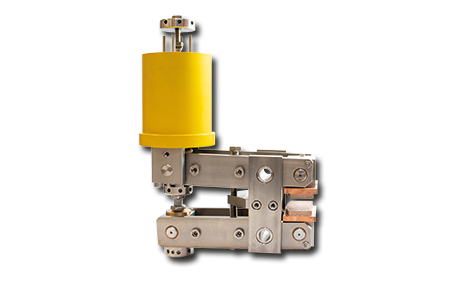
레일 클램프와 레일 브레이크
- 컴팩트한 사이즈로 매우 높은 제동력
- 유압챔버가 상부에 위치하여 브레이크 씰을 쉽고 안전하게 교체함
- 모든 통상적 레일 프로필에 맞음
- “브레이크 열림” 및 “브레이크 패드 마모”에 대한 유도식 및 기계식 센서
- 부식 방지 코팅 C5-M (CX) 까지
- 레일클램프용 최대 홀딩 힘: 500 kN
- 레일 브레이크 용 최대 홀딩 힘: 300 kN
- 레일 클팸프 횡간 유동 최대 +/- 30 mm
- 레일 클램프 수직 유동 최대 +/- 5 mm


옵션
- 내장 HPU 와 콘트롤 박스
- 브레이크 세팅타임 조정을 위한 트로틀 밸브
- 브레이크와 HPU 간의 유압배관
- 체코팅 또는 스테인리스 스틸 보호 커버
- 오일 받이
- 스톰브레이크의 역동 제어를 위한 특수 브레이크 패드

갠트리 구동용 서비스 브레이크

전기 마그넷 브레이크 DH 034 FEM
- 단순하면서 견고한 브레이크 설계
- 최고의 부식 방지를 위한 스테인리스 스틸 레버
- 역동적 및 정적 적용에 적합
- 용이한 설치 및 유지보수
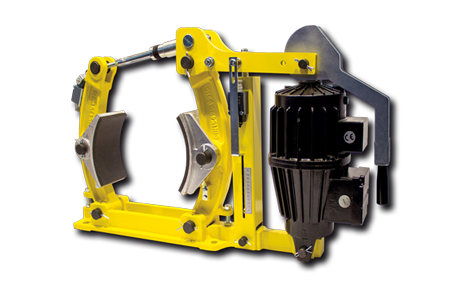
전기 유압식 디스크 브레이크 및 드럼브레이크
- 드럼브레이크가 DIN 15435 표준에 따른 미터식 그리고 AISE 표준에 따른 인치크기로 제공됨
- 견고하면서 단순한 디자인
- 자체 윤활 부싱
- 스테인리스 스틸 핀 과 스핀들
- 자동 마모 보정장치
- 디스크 브레이크용 오가닉 및 신터 라이닝
- 드럼브레이크용 오가닉 라이닝
- 옵션으로 자동 센터링 유닛
- 지연 제동 세팅용으로 트러스터에 옵션 트로틀 밸브
호이스트 감속기의 수명을 연장하기 위한 솔류션

항만 크레인용 제동 시스템
| 지난 수년동안 컨테이너 선박의 크기가 지속적으로 증대되 었습니다. 이는 컨테이너 크레인을 더 거대해지게 만들게 했 습니다. 전체 높이나 붐의 도달거리가 커졌을 뿐만 아니라 권상속도 및 스프레더에 달리는 최대하중도 증대되었습니 다. 결과적으로 카테고리 제로 비상브레이크시 베어링에 그 리고 크레인의 스틸구조에 걸리는 최대 토르크가 상승하게 되었습니다. | RINGSPANN 은 모든 영역을 총망라하는 제동 솔류션을 개발 하였고 동일한 목적을 달성합니다. 이는 피크 토르크 및 백 래시의 임팩트를 최소화 하는 것입니다. |
플랭크 변동 방지감속기 안에서 플랭크 변동은 강한 제동으로 감속기 안의 개별 기어간의 접촉이 짧은 시간 동안 분리될 때 발생합니다 (예로, 비상 제동시). 이는 손상을 불러오 는 쇼크 부하를 결과로 가져옵니다. 플랭크 변화를 제 거하기 위해서는 구동중인 쪽의 반대쪽에서 브레이크 를 먼저 제동하는 것이 중요합니다. 권상중이라면 이 는 비상브레이크쪽 입니다. 하강중이라면 이는 서비 스 브레이크 입니다. |
메인 호이스트에서 적응적 제동피크 토르크를 줄이기 위해서는 비상브레이크의 제동 력을 권상 상황에 맞추어 조절할 수 있습니다. 스프레 더가 비어있을 때 권상 또는 하강시 필요한 제동 토르 크는 최대 하중으로 권상 또는 하강할 때보다 더 낮습 니다. 빈 스프레더로 권상 또는 하강하는 과정에서 브 레이크 조합은 충분하지만 그러나 과대한 제동력을 발 휘하지 않독록 해야 합니다. 최대 하중으로 권상 또는 하강하는 과정에서는 모든 비상 브레이크가 즉시 닫 힙니다. 두 가지 경우 모두 호이스트는 안전하게 정지 상태로 서게됩니다. |
붐 호이스트에서 적응적 제동붐을 비상정지시키는 동안 피크 토르크를 줄이기 위 해서는, 비상 브레이크 캘리퍼가 두가지 서로 다른 제 동력으로 제동할 필요가 있습니다. 이는 HPU 에 두가 지 서로 다른 밸브 구성을 사전 선택함으로써 달성됩 니다. 첫번째 구성은 즉시 제동하는 것을 허용하고, 두 번째 구성은 최초 감소된 제동력으로 제동하다가 시 간이 지나면서 제동력을 높이는 2 단계 제동을 가능 하게 합니다. |
과속 및 감속기 오류 감지RINGSPANN 속도 감시 모듈 SMM 으로 PLC 에 기반 한 컨트롤 유닛을 제공합니다. 이는 감속기 오류, 역 방향 회전 및 과속을 포함한 여러가지 상태를 감지하 는 점진적 및 절대적 인코더 조합으로 호이스트 속도 를 감시합니다. |
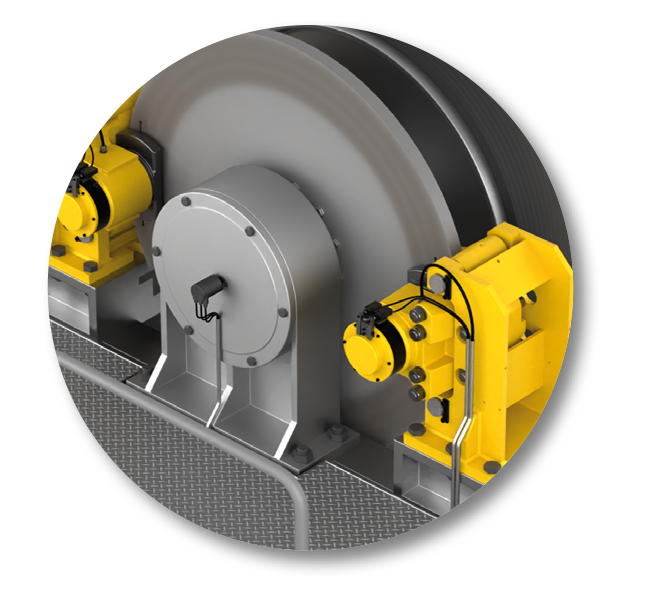
솔류션: 플랭크 변동 방지
| 케테고리 제로 비상제동시 메인 호이스트 구동에서 발생하 는 통상적인 문제는 감속기 안에서 플랭크 변화입니다. 이런 원하지 않는 효과를 피하기 위해서는 구동하고 있는 쪽의 반 대쪽에서 브레이크를 먼저 잡는 것입니다: |
|
| 플랭크 변동을 피하기 위해서는 두 가지 브레이크 타입 - 즉, 로프 드럼 쪽의 비상 브레이크 캘리퍼와 모터 출력축에 있는 전기유압식 트러스터 브레이크 (서비스 브레이크) 모두가 올 바른 순서에 따라 잡혀야 합니다: |
|
적용
RINGSPANN 브레이크 컨트롤 시스템 BCS
권상 또는 하강




플로우 차트 설명
플랭크 변동을 방지할 용도의 RINGSPANN BCS 는 두 가 지 중요 요소로 구성됩니다. 두 개의 사전 세팅닫힘 시간 으로 닫히는 전기 유압식 트러스터와 각각의 닫힘 시간을 사전 선택할 수 있는 콘트롤 유닛.
시스템 자체는 크레인 콘트롤 시스템으로부터 단 한 가 지 정보만을 받으면 되는 독립 솔류션입니다. 즉, 크레인 이 지금 권상중인가 또는 하강중인가? 솔류션은 신작 크 레인이든 감속기의 수명을 증대하는 보수 크래인이든 쉽 게 통합될 수 있습니다.
솔류션: 메인 호이스트에서 적응식 제동
| 호이스트용 브레이크를 선정할 때에 최대 권상 속도와 최대 권상 부하를 결합하는 것이 보통 기본입니다. 최대 권상 하 중과 최대 권상 속도가 모두 적용되는 운용 조건하에서는 모 든 브레이크의 제동력은 비상시에 호이스트를 멈출 수 있는 충분한 대응력을 갖습니다. | 대 하중의 절반으로 운용된다면, 모든 호이스트 브레이크의 제동력은 너무 높습니다. 이는 감속기에 매우 높은 피크 토 르크, 크레인 스틸 구조에 중대한 임팩트, 부하를 지탱하는 베어링에 매우 높은 부하를 가져다 주는 결과를 불러옵니다. |
솔류션은 세가지 구성요소로 되어있습니다:
|
적용
RINGSPANN 브레이크 컨트롤 시스템 BCS
부하 케이스 1, 2 또는 3

브레이크 2 가 지연되어 적용됨
브레이크 2 가 즉시 적용됨
즉시 적용됨
플로우 차트 설명
RINGSPANN BCS 는 단순하고 쉽게 통합될 수 있습니다. RINGSPANN 콘트롤 유닛은 크레인 운용시스템으로부터 크레인 상태에 대한 정보를 받습니다. 여러가지 부하 케 이스를 구분하여 인지합니다. 예로, 한 가지 가능한 부하 케이스는 빈 스프레더를 전속력으로 이동하는 것입니다. 콘트롤 유닛은 이 정보를 이용하여 RINGSPANN HPU 상 에 사전 선정된 밸브 구성을 세팅합니다. 지금 언급한 빈 스프레더 이동을 위해서는 충분하면서도 지나치지 않은 제동력으로 호이스트를 안전하게 멈출 수 있는 제동 조 합을 활성화 시킵니다. 다른 브레이크는 자동으로 약간의 지연 후에야 활성화됩니다. 결국 전체 제동력이 사용되어 크레인을 안전하게 멈추게 합니다. 필요하다면 이 솔류션 을 더 확장하여 다양한 수의 브레이크와 부하 케이스를 포 함시킬 수 있습니다.
솔류션: 붐 호이스트에서 적응적 제동
| 컨테이너 크레인이 작업하고 있지 않을 때에는 해수면 쪽 의 붐이 올려지고 수직 휴식상태로 놓여집니다. 이렇게 함 으로써 운행상의 안전을 도모할 수 있고 (다가오는 또는 떠 나는 선박과 충돌 방지) 또는 기후상태에 대해 안전해질 수 있습니다. | 크레인이 작업을 위해서 준비되면, 붐이 내려집니다. 붐이 수평 상태로 작업위치에 가까이 가면 갈수록 부하 토르크가 증가합니다. 붐 브레이크의 최대 제동력은 붐이 멈추어 서고 수평으로 작업위치에 가깝게 갈 수 있도록 선정되었습니다. |
| 만약 붐이 권상 또는 하강중 의도하지 않았던 비상 제동이 발 생하면 모든 브레이크가 최대 힘으로 제동합니다. 붐이 수직 으로 쉬는 위치에 가까이 와서 이런 일이 발생하면 문제입니 다. 파괴적인 토크 피크가 감속기, 베어링 및 스틸 구조물에 전해지기 때문입니다. | 붐 권상시 비상정지 동안 발생할 수 있는 토크 피크를 제한 하기 위한 적응적 제동은 베어링, 감속기 및 스틸구조의 조 기 마모를 방지할 수 있습니다. 이는 제동력을 조정할 수 있 기 때문에 달성될 수 있는 것입니다. 붐의 현 위치에 따라 비 상브레이크와 연결된 HPU 에 상이한 밸브 위치를 선정합니 다. 이는 높은 붐의 위치에서 브레이크 제동을 시작할 때 제 동력을 낮추어 줍니다. |
적용
RINGSPANN 브레이크 컨트롤 시스템 BCS
붐 위치
플로우 차트 설명
시스템은 4 가지 구성품으로 되어있습니다:- 케이블 드럼의 베어링에 장착된 절대 엔코더가 크레인 운용 시스템을 통해 붐의 위치정보를 제공함
- 콘트롤유닛이 엔코더로부터 받는 시그널을 활용하여 이를 기반으로 붐 비상 홀딩 브레이크의 HPU 에 있는 여러가지 밸브 상태를 조작합니다
- HPU 가 특수 밸브의 조합을 통해서 즉시 제동을 가능하게 하거나 또는 제한된 제동력으로 시작하였다가 짧은 시간 동안 점차 제동력을 증가해주는 일을 합니다
- HPU 와 컨트롤 유닛을 통해 한 대의 또는 여러 대의 비상 브레이크가 상이한 제동력으로 브레이크 프로세스를 시작합니다
솔류션: 과속 및 감속기 오류 감지
| 호이스트로 작업하는 중에 기능장애가 발생할 수 있습니다. 따라서, 호이스트에 적절한 감시 유닛을 설치하여 안전한 운 용을 보장할 수 있습니다. RINGSPANN 은 속도 감시 모듈 SMM 을 이 목적을 위해 제공합니다. 이는 잠재적으로 위험 한 상황을 초기 단계에 보고하여 비상정지와 같은 대책을 신 속하게 시작할 수 있게 해줍니다. |
적용
RINGSPANN 속도 감시 모듈 SMM

플로우 차트 설명
RINGSPANN 속도 감시 모듈 SMM 은 검속기 입력 측의 신호와 감속기 출력 측의 신호를 계속적으로 감시합니다. 만약 사전 설정한 제한값을 초과할 경우 (예로, 하강시 제 한 속도), 오류 메시지가 크레인 운용시스템에 발송됩니다. 대안으로는, SMM 이 BCS 브레이크 콘트롤 시스템과 연결되어 제한값이 초과될 경우 즉시 비상 제동이 실행되 게 할 수도 있습니다.